




OGN_3DCG制作事業の紹介

3D-CADデータからフォトリアルなCGを制作するサービスを開始しました。
工作機械などの大型の製品でも、3D-CADデータを提供いただければ、カタログや展示会で使用する写真やアニメーションを1か月程度のL/Tで制作させていただきます。機密情報にも配慮した形状のデフォルメも可能です。
GCCP(Green Controlfor Coolant Pump)

「その加工、そんなにクーラント要りますか?」「マシニングセンタでの加工時、クーラント装置が消費する電力はなんと 全体の約64%!、必要なときにだけクーラント液を出すように制御して、電気代もCO.排出量も 削減しませんか?」
GCCPはクーラント装置のポンプを簡単操作で制御し、加工時の電力量を大幅削減できるソフトです。
ブルームノボテスト:ポータブル式主軸管理ユニット“PSC”

ポータブル式主軸管理ユニット“PSC”は構成要素「レーザ式工具測定システム“LC50-DIGILOG”」と「測定結果解析用ソフトウェア“LC-Vision”」の主軸管理機能から構成され、主軸管理を安価に簡便に可能にする持ち運びできるユニットです。
ユーザー仕様として「工作機械メーカーでの初期評価基準」としてもらう活動をすれば初期状態からメンテナンスにつなげることができます。
エンドユーザーや工作機械メーカーのサービス部門に使ってもらえば拡がるユニ��ットです。是非、エンドユーザー様にご提案ください。
経験上、主軸ケースに振動センサーを取付けできるようにしておいてサービスエンジニアが振動測定機器を持ち込んで測定していますので、従来と比較して、簡単に評価ができるようになります。
OGN における3D プリンターの活用

【内容】 3D プリンターを使用したイメージ DR と部品製作
3D モデルから3D プリンターを使用してリアルに可視化してリアル検証を可能にしました。
FDM 造形(FusedDepositionModeling)と光造形(Stereolithography)が
OGN の差別化ポイントです。
【効果】バーチャル検証とは違ったリアルな可視化を共有できる点が特徴です。部品製作
においても、実用できる材質で、そのままで使用できるほど精巧な形状を再現しています。
JCCのVR(バーチャルリアリティー)活用

【内容】
設備のデザイン、作業性をバーチャルに検証し、やり直しのない設計、製作を実現、設計段階で作業ができるか、機器のメンテナンスができるかを関係部署にバーチャル検証してもらい、指摘された点を修正、実機立会では修正点を確認するのみにできる。
【効果】
立会指摘ゼロの達成、設備製作リードタイムの短縮ができた。
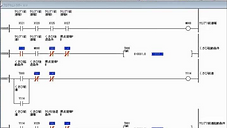
ICAD-SX+IOCによる電気制御回路のバーチャル検証

【内容】 電気制御回路のバーチャル検証
電気制御回路の検証(デバッグ)を、3Dモデルでバーチャルに動かし、設備の製作前に検証を可能にしました。NC機、ロボットのシステムにおいても検証ができることが差別化ポイントです。
【効果】
設備ができた段階ではじめて電気制御回路の検証(デバッグ)行っているのに比較して現場での対応時間が短縮でき、設備のリードタイム短縮につながります。
商業用フィギュアの原型データ製作

岐阜ドローイング株式会社では商業用フィギュアを作成しています。商業用フィギュアの原型データが完成するまでを、CGスカルプトツールを使ったワークフローでご説明いたします。ご興味のある方はご連絡ください。
動体検出を利用した安全監視システム

【お客様の困りごと】 一般的にロボットを使用した設備では、安全確保のための安全柵設置や他のインターロック方法では大掛かりで費用とスペースは必要となり、また作業員の動線も確保できない。
【内容】 危険性や有害性があると判断するエリアをUI(ユーザーインターフェイス)にて指定し、エリア内に動体があるかを画像処理にて判断し、動体があるときは、ロボット動作を停止させます。
【効果】 ロボットの全稼働領域を囲う必要がないため、安価に安全柵を設置せずに安全確保できた。
フラスコ内の液体計量システム

【お客様の困りごと】 作業員が1000個/日の計量を行う必要があり、その作業時間が長く負担になっていた。計量する容器、容量が複数あり、同じ容器でも個体差があること、また液体の比重も異なるため、正しい計量が難しい。
【内容】 画像処理でメニスカス(界面張力によって細管内液体の表面がつくる凸または凹状の曲面)�を考慮したシステムを構築。
【効果】 適量計測でき、液体が規定値になるまで注水。作業の自動化ができ、大幅に工数が削減できた。
ワーク位置自動認識によるピッキングシステム

【お客様の�困りごと】 一般的にロボットを使用した設備では、ワークの特性に合わせたピッキング条件や環境を作る必要がある。
【内容】 この事例は画像処理のみでワークの位置、角度を認識(角度はワークの形状や模様で認識)し、この位置情報を元にロボットがピッキングを行うことができるシステムの提案です。
【効果】 画像処理でのワーク認識が可能となるため、ワークの特性に合わせたピッキング条件や環境が不要となり、システムがシンプルかつ安価に構築できる。
良品画像を用いたAIによる外観検査システム

【内容】
予め良品ワークの画像を学習データとして登録しておく事で、撮影したワーク画像が良品か不良品かを判別します。結果として、良品ワークとの差異を明示的に表示します。
【効果】
目視での外観検査によるムラ(ヒューマンエラー)の予防に繋がります。
外観検査を自動化することも可能です。
ステレオ計測を用いた段取台検査システム

【内容】
段取台の横方向から2台のカメラを用いることで距離(深度)を計測します。正しい距離と比較する事で段取の不良を検知します。カメラ設置時点で予めキャリブレーションが必要となります。
【効果】
ステレオ計測を用いて物体との距離を測定する事ができます
AMRを用いた搬送の自動化

【内容】
AMR を用いたシステムにより搬送業務を自動化します。
(AMR とは、Autonomous Mobile Robot の略称で、日本語では「自律走行搬送ロボット」と訳されています。 次世代 AGV として注目されている AMR は、AGV 導入時に必要なガイド無しでの走行が可能で、自ら判断し、人や障害物を自動的に回避し移動するロボット です。)
【効果】
工場内にガイドを設置することなく、搬送を自動化できる。
また、生産管理やその他のシステムと連動することで、必要なタイミングで搬送処理が実行できる。
古い機械やメーターをカメラでデータ化(ΩEye)

【内容】
・データ化が困難な古い機械やメーターを、画像処理によりデータ化します
・ランプ、文字、アナログメーター、デジタルメーター、直線型のメーターを20 個まで同時に認識して、認識結果を CSV 形式で出力します。
【効果】
・対象機器をカメラで撮影するだけでデータ化をすることができます。 機器の改造等が不要なため、機器の動作に影響なく安全に導入できます。
アームロボットの動的制御

【内容】
アームロボットの動的制御を実現します。
(動的制御とは、状態や構成が状況に応じて変化したり、状況に合わせて選択できたりする柔軟性を持っている制御方法)
【効果】
従来からのティーチングプレイバックでは実現が難しいシステムに対応出来る。
今まで人手で作業していた工程を無人化・省人化出来る。
熟練者しか作業できなかった工程を初心者でも出来るようになる。
空圧実習装置

【内容】
・回路設計と組立実習を主体とした空気圧実習装置です。
・空気圧制御・有接点リレー制御・PLC制御の学習ができます。
・トランク形状であり100V電源なので場�所を選びません。
【効果】
・初心者向けに空圧機器の機構から動作確認まで学習可能です。
・PLCを別途用意してシーケンス制御の学習も可能です。
オフショアリングによる設計費 AI開発費のコストダウン

日本+オフショアの連携で3D設計費、AI開発費を60%以上削減!
日本からリアルタイムにオフショアの設計状況を把握し、アドバイスや指導を行う独自の技術でミスのないコストダウンを実現します。
AI導入による検査工程のコストダウン

検査設備設計の経験と実績を基に最適なAI外観検査システムを提案!
ディープラーニングを活用した物体認識・検出エラーの分析から、独自の高精度AI技術を開発。
光と製品形状の関係に着目し認識率を飛躍的に向上しました。
AI導入による設計の効率化

独自のAI技術を駆使し、CAD設計工程での検図からの自動修正機能や3Dモデルからの配管部品図自動作成、製作図面自動作成を可能にした。また夜間の部品図自動作成で大幅に設計者の時間を高付加価値にシフトすることができる。
バーチャルDR

【内容】
開発設計→DR→試作→実機DR→やり直し:開発機発表まであとわずか→切った張ったの繰り返し
こんな経験ありませんか?→バーチャルDRで解決しましょう!試作前に3D設計データを使ってバーチャルDRを実施
【効果】
作業性、デザイン、生産準備の確認が試作前に可能→やり直しのない開発が可能
一味違ったロボットシミュレーション

【内容】
ロボットシミュレーションソフトを導入したが使いこなせていない。ロボットだけの動作を見ても、周辺装置や他の制御装置との関係がなければ正確なシミュレーションにならない。・・・現場であれこれと修正して時間がかかる→ロボット以外の周辺装置の制御機器をETHERNET経由で接続し、ロボット間インターロック信号や付随装置の入出⼒を含めたシミュレーションを可能とした
【効果】
オフラインティーチングとオンラインティーチングをバランスよく使いこなし現場での作業時間を短縮
NCプログラム作成支援

【困りごと】
・設計部門でNCプログラム作成ができない→現場任せ→加工&サイクルタイム検証は現場でのトライ&エラー対応
・昔から同じことの繰り返し→現場で加工調整が⻑くなり納期逼迫
【内容&効果】
・CAMによるNCプログラム作成→事前検証→NCプログラムを作成
・事前に机上で検証→現場でのNCプログラム作成と調整を解放
・機械と刃具と工作物の干渉を事前に回避
・サイクルタイムを事前検証→現場での調整を短縮→リードタイム短縮
制御シミュレーション
【内容】
・困り事:設備の運転調整に時間がかかり、納期に間に合わない
→ 3Dモデルを使用した制御回路の事前デバックで解消
・シーケンス回路、NCプログラムでの動作をビジュアルに確認し検証
【効果】
・企画通りの運転時間の達成=リードタイム短縮
・企画サイクルタイムの事前検証
デジタルマニュアル活用②

【内容】
・製造の組⽴工程を3D手順書で⾒える化と最適化を実現(工程表作成、部品表作成)
・3D保全要領で海外のサービス現地化を支援
【効果】
・開発設計段階で組立工程の作業性検証と容易化で試作&改善を繰り返すことなく、組立時間を決定できる
・問合せの多いアフターサービスの現地完結化が可��能になる
Starbucksに学ぶ

【内容】
STARBUCKSが普段から店内での接客する店内接客者(パートナー)に気を付けていることやトレーナーが店内接客者に接する接し方を教育し、独自のSTARBUCKS文化を築いている。このリーフレットは、某社TQM推��進部が自社の自工程完結推進に展開したものを頂いたものです。
デジタルマニュアル活用①

【内容】
・紙に印刷されたマーカからデジタルデータを呼び出して、タブレット端末でAR表��示や3D動画でのメンテナンス動作が確認できる。
【効果】
・これまで紙のマニュアルでできなかった視覚的な形状認識ができ、動画で効率よく学習できる。不慣れな設備であっても、経験を積んだサービスマンであれば素早く理解ができる。